中国邮递员问题(更新中)
今天在写数据结构实验的时候,一不小心选到了图论单元应该最难的实验:中国邮递员问题(绝对不是因为题目太短以为很简单所以才选的QAQ)由于题目过于简短,不太容易上手,所以我选择查阅资料学习后再完成。偏偏在各个地方都不太容易找到这个问题的完整求解方法,故博主学习整理之后,将学习的心路历程分享出来,希望能帮助到遇到困难的朋友。
1. 问题描述
在一座城市有一个邮局,邮局的快递员每天在城市不同的区域派送邮件,区域与区域之间有街道相连。快递员希望在派件的时候:
- 经过所有区域与区域之间的街道至少一次
- 派件结束后回到邮局
- 整个路程最短
请输出符合上述条件的路线。
中国邮递员问题(CPP)由管梅谷教授于1960年提出,将这个问题抽象为图论可以理解为:在一张带非负权连通图上遍历所有的边,最后回到遍历起点,要求总权最小求遍历路径。其中区域可以抽象成顶点,街道可以抽象为边,所管辖的城市可用一个赋权图来表示,其中边的权重表示对应街道的长度。
对于这个问题已经证明:
- 如果只含有双向道(无向图),为P问题。
- 如果只含有单向道(有向图),为NPC问题。
- 如果既含有双向道,又含有单向道,为NP-Hard问题。
本文在实际生活场景下讨论无向图的CPP。
2. 问题分析
从题目可以很容易看出,既要经过所有的边,又要最短,那最优的情况的就是每条边只走一次,即一笔画。围绕这个特点我们可以知道,如果所给图为欧拉图,那么存在欧拉回路使得每条边都只遍历一次且能回到起点,在这种情况下欧拉回路就是最优环游。
所以可以将这个问题分成两类:
- 所给图为欧拉图,求出欧拉回路。
- 所给图为非欧拉图。
2. 1 欧拉图
对于求解欧拉回路有两种解法:Fleury和Hierholzer,不过Hierholzer的效率更高,在这里介绍下Hierholzer算法求解欧拉回路。
Hierholzer算法的核心很简单,就是通过不断删边找到可能的欧拉回路。算法步骤为:
- 从当前点开始,遍历关联边对应的相邻点,并将这条关联边删除。
- 若当前点没有关联边,则将当前点压入序列栈中。
我们用一个简单的例子来直观的理解这个算法的思路:
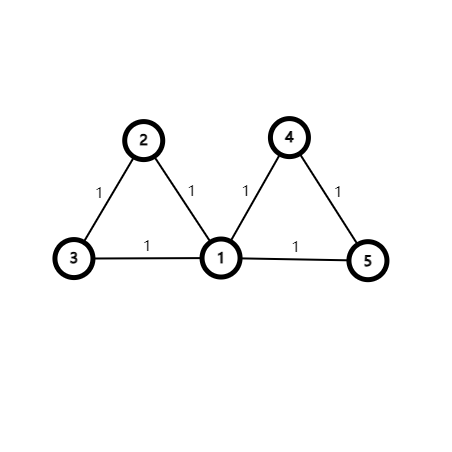
在上图中,比较容易知道所有的顶点的度都为偶数,存在一条欧拉回路,使得能够一次性遍历所有的边,符合Hierholzer算法的应用条件,我们选取顶点1为邮局的位置(起点):
- 对
1的所有关联边进行遍历,其相邻点有:2,3,4,5 - 选取
1的相邻点2,1-2没有被访问过,访问1-2 - 对
2的所有关联边进行遍历,其相邻点有:1,3 - 选取
2的相邻点1,2-1已经被访问过,不再访问 - 选取
2的相邻点3,2-3没有被访问过,访问2-3 - 对
3的所有关联边进行遍历,其相邻点都有:1,2 - 选取
3的相邻点1,3-1没有被访问过,访问3-1 - 对
1的所有关联边进行遍历,其相邻点有:2,3,4,5 - 选取
1的相邻点2,3,1-2和1-3都被访问过,不再访问 - 选取
1的相邻点4,1-4没有被访问过,访问1-4 - 对
4的所有关联边进行遍历,其相邻点有:1,5 - 选取
4的相邻点1,4-1已经被访问过,不再访问 - 选取
代码如下:
1 | |
在上述代码中:
info为顶点的相关信息,to表示与当前顶点相连的下一个顶点的编号,dis表示当前节点到下一个结点的距离(其实也可以用std::pair来实现,不过我觉得定义一个新的结构体比较直观一点)g[now]为std::vector类型的邻接表,用于存储当前节点相连的下一个节点的infopath为用于存储最终的欧拉回路路径vis[now][i.to]用于判断当前边是否有被访问过,由于是无向图,所以往返路径都要标记为已访问
由于欧拉回路能一次性遍历所有边,故当访问到当前顶点没有关联边的时候,其在路径中的位置也就随之确定。